
【摘要】具身智能的广泛应用和持续优化将带动相关领域的技术创新和生产力提升,为社会带来巨大的经济效益。然而,具身智能零部件及整机在不同应用场景下的性能与质量问题,仍是制约其发展的关键瓶颈。构建场景驱动的具身智能标准体系,应以整体框架与标准制定为基础,打造集成机器人计量校准、性能功能测试、产品认证的一站式平台,进一步提升我国具身智能机器人产品性能与质量,加快推动我国具身智能机器人产品进入全球市场,从而在技术性与经济性两个方面提升我国具身智能的产业竞争力。
【关键词】具身智能 标准制定 质量保证 供应链 场景驱动
【中图分类号】 TP18/F49 【文献标识码】A
【DOI】10.16619/j.cnki.rmltxsqy.2025.10.009
【作者简介】刘少山,深圳市人工智能与机器人研究院具身智能中心主任、研究员,世界青年科学院院士。研究方向为具身智能、机器人计算系统以及自动驾驶。主要著作有《Robotic Computing on FPGAs》等。丁宁,深圳市人工智能与机器人研究院常务副院长、研究员。研究方向为特种机器人与计算机视觉。主要论文有《CCRobot-V: A Silkworm-Like Cooperative Cable-Climbing Robotic System for Cable Inspection and Maintenance》等。
具身智能概述
具身智能是将人工智能嵌入机器人等物理实体,使其具备感知、学习和与环境动态交互能力的智能系统。[1]具身智能的理论起源于1991年,彼时罗德尼·布鲁克斯(Rodney Brooks)发表的研究论文《没有表征的智能》对智能进行了根本性的重新思考。[2]布鲁克斯反对传统观点,即智能必须基于复杂算法或内部数据模型。他认为,智能行为可以直接从自主机器与环境的简单物理交互中产生,而无需依赖预设的复杂算法。其核心观点在于,智能系统不应首先处理抽象的内部表征,而应直接响应外部环境的刺激。
1999年,罗尔夫·普费弗(Rolf Pfeifer)和克里斯蒂安·谢尔(Christian Scheier)提出智能是行为主体的整个身体结构和功能的综合体现,强调了身体对智能形成的根本影响,这一理论后来被称为“具身智能”(Embodied Intelligence)或“具身认知”(Embodied Cognition)。[3]他们的核心观点是,智能行为通过身体与环境的直接相互作用产生,而不仅仅是大脑内部的计算过程。这一观点与传统的大脑或计算中心的智能理解形成了鲜明对比。
从认知科学的角度来看,琳达·史密斯(Linda Smith)在2005年提出了“具身假说”(Embodiment Hypothesis)主张,认为人类的认知过程不仅仅是大脑内部的抽象思考,更是通过身体与物理环境的直接互动实现的。[4]这一观点强调,身体不仅是感知世界的工具,更是影响和塑造认知结构的主体。具身假说还特别强调了环境在认知发展中的作用,认为环境的结构和特性不仅能够提供感官输入,还直接参与了认知能力的形成。
基于这些基础研究,笔者总结了三个关于具身智能的原则:第一,具身智能系统无需依赖预定义的复杂逻辑来管理特定场景,而是能够灵活应对多变的环境。第二,具身智能系统必须包含进化学习机制,使其能够不断适应运行环境,从而允许具身智能系统从经验中学习,并随着时间推移优化其性能。第三,环境在塑造物理行为和认知结构方面起着关键作用。环境不仅是具身智能系统操作的舞台,更是影响和塑造系统行为与认知发展的关键因素。
具身智能由于具备从环境中学习的能力,因此展现出高度的通用性,能够快速渗透到各行各业,从而显著提升生产力。[5]例如,传统的工业机器人通常需要为特定任务进行编程和配置,调整过程繁琐且耗时。而具身智能机器人可以通过与环境的互动自主学习,适应不同的生产任务。例如,在汽车制造中,具身智能机器人可以自主学习和适应不同车型的装配要求,无需频繁重新编程,大大提高了生产线的柔性和效率。
具身智能的广泛应用和持续优化将带动各行各业的技术创新和生产力提升,为社会带来巨大的经济效益。然而,具身智能零部件及整机在不同应用场景下的性能与可靠性问题,仍是制约其发展的关键瓶颈,亟待通过建立标准体系来解决,这也是本文探讨的重点。首先,各行业和应用场景的需求日趋多样化,具身智能系统需要具备高度的适应能力。工业制造中的机器人需要应对复杂环境,而医疗领域的机器人则需要高精度和高稳定性。如果零部件性能不稳定,则可能影响整体系统的可靠性和实际应用效果。其次,具身智能整机的可靠性不足,现阶段由于缺乏统一标准,不同厂商生产的零部件和整机在兼容性与可靠性上存在差异。这不仅增加了系统集成难度,也降低了其整体性能和稳定性。
建立标准体系是解决这些问题的关键。具体来看,这一体系应涵盖四个方面。一是建立性能标准,确保零部件和整机在各种环境下稳定运行;二是建立兼容性标准,确保不同厂家生产的组件无缝集成;三是建立安全标准,确保系统在实际应用中的安全性和可靠性;四是建立测试与认证体系,对具身智能系统进行全面测试和认证,确保其符合相关标准和规范。这些措施将有助于提升具身智能的性能和可靠性,推动其在相关领域的广泛应用。
我国在全球具身智能供应链的优势地位
2001年加入世界贸易组织后,中国迅速成为全球制造业大国,通过大规模生产显著降低了工业产品价格。特别是2010年以来,中国通过大量政府激励措施推动了智能电动汽车行业的发展。鉴于智能电动汽车和具身智能机器人供应链的合作关系,许多关键的智能电动汽车零部件制造商已转向机器人领域,推动了中国具身智能产业供应链的成熟和发展。[6]
如图1所示,目前具身智能机器人主要包括以下核心零部件。视觉传感器:捕捉环境的三维几何结构,对于机器人感知深度和距离、自主导航、识别物体和操作任务至关重要;力传感器:测量施加在机器人上或由机器人施加的力,使机器人能够以正确的力度抓取物体而不造成损坏,用以增强机器人的触觉反馈和灵巧度;微型传动系统:微型电机和执行器,使精确的运动和控制成为可能;精密力控系统:高精度调节力输出的先进系统,在机器人执行精细任务的应用中(如装配线或医学手术),确保机器人能够安全有效地执行其功能而不造成伤害或损坏;关节模组:负责机器人不同部分的关节和运动的组件,使机器人能够以人类般的灵活性和灵巧度移动;基础大模型:具身智能机器人的大脑,使机器人能够处理自然语言、识别物体并根据其对环境和任务的理解作出明智决策;机器人计算芯片:专为高效处理机器人算法而设计的硬件,使复杂模型的快速高效处理成为可能;机器人控制芯片:管理机器人系统操作的专用微处理器,确保机器人能够顺利执行任务并迅速响应环境变化;云计算平台:通过互联网提供大量计算资源和存储空间,在条件允许的情况下可从机器人中卸载繁重的任务。

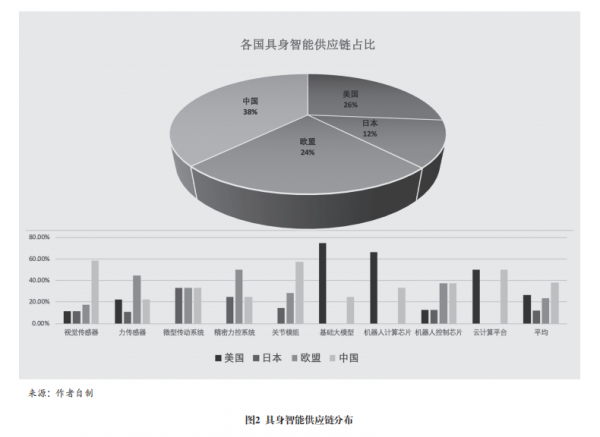
如图2所示,笔者汇总了具身智能零部件供应链的核心企业,并对这些企业在全球的分布进行了综合分析。目前,中国在全球智能机器人供应链中的占比达38%,特别是在视觉传感器和机器人关节模组等领域表现优异,成本效益显著。然而,这种优势主要体现在性价比方面,在关键零部件的性能与可靠性上仍与国际领先品牌存在较大差距。以视觉传感器为例,尽管中国的产品在价格上具有显著优势,但在分辨率、灵敏度和可靠性方面较之国际顶尖品牌仍有一定差距。例如,美国的FLIR公司在红外热成像技术方面处于领先地位,其产品在军事和工业应用中因其卓越的性能和可靠性广受社会认可,而国内同类产品在这些方面仍有较大提升空间。再如,微型传动系统,中国的企业在生产成本和价格上具有明显优势,但在精度、效率和使用寿命方面与日本的Nidec公司相比,仍存在差距。
因此,我国发展具身智能标准体系显得尤为重要。标准体系的建立不仅有助于提高零部件的性能和可靠性,也有利于提高国内企业在国际市场上的竞争力。此外,统一的标准体系能够促进企业之间的协作和技术共享,加速技术创新和产业升级,进一步缩小与国际领先品牌的差距。
具身智能的性能与质量问题
具身智能机器人产业链上游包括视觉传感器、力传感器、微型传动系统、精密力控系统、关节模组、机器人计算芯片等硬件部分以及软件系统。从长远来看,包括运动控制及人工智能大模型等在内的软件部分无疑最有价值,掌握相关技术,相当于掌控了具身智能机器人的中枢与大脑,并可主导相关产业发展方向。但近期成本占比更高的是视觉传感器、力传感器、微型传动系统、精密力控系统、关节模组等核心零部件,占比超过70%。下文选取具身智能机器人零部件组成部分中的减速器、电机为例,进行国内外产品质量及性能的对比分析。
减速器。在具身智能机器人领域,减速器与电机、传感器、驱动器等构成关节执行器。现阶段,我国仍未完全掌握部分核心技术,行业整体水平较之国际一流水平仍有差距,国内产品性能及可靠性初步达到国际主流水平,但国内产品主要集中于中低端应用,高端市场大部分由国外产品占据。[7]
衡量精密减速器的主要指标包括:扭转刚度、传动精度、启动转矩、空程、背隙、传动误差、传动效率等。总体而言,国内产品的短板主要表现在两个方面:一是产品系列不完备。日本某供应商具备全系列产品,基本上可以应用于所有领域,而国内产品系列还有待完善。二是匹配性有待提升。国产减速器在实际使用环境中的性能与实验室性能无法完全匹配,个别产品存在漏油、精度降低等情况,这是阻碍国产减速器进军高端市场的原因之一。[8]
电机。电机主要为具身智能机器人各种动作和姿态的实现提供动力,具备减速、传动、提升扭矩等功能。无框力矩电机和空心杯电机是具身智能机器人重要的电机部件,而在该领域我国企业与国际头部企业仍存在较大差距。具体来说,国内产品在无框力矩电机的转矩密度方面与国外高端无框力矩电机仍存在差距;在空心杯电机方面,国外厂商采用一次性绕制成型技术,掌握了壁垒线圈绕组设计和加工、壁垒绕线设备技术等核心技术,而国内企业主要用绕卷式生产,工艺繁琐且自动化程度低,性能与国外产品存在较大差距,且绕线机一般只能绕制尺寸较小、线径较细、形状单一的线圈,无法满足大功率空心杯电机的要求。[9]
以上所提及的具身智能关键零部件方面的问题,使得国内厂商倾向于选择性能更佳的国外零部件。这不仅阻碍了国内企业在具身智能产业链高端环节的发展,降低了产业附加值,而且削弱了国产具身智能产业链的自主性和整体竞争力。同时,技术上的差距还使得国内企业较为依赖进口关键零部件或技术,这不仅提高了生产成本,还可能因国际贸易政策的变化而使供应链面临中断的风险。尤其值得警惕的是,具身智能技术未来在国防安全领域的重要性不言而喻,其重要零部件对国外产品的过度依赖可能使国家在关键时刻陷入战略上的被动。
因此,实现具身智能产业链关键零部件和技术的自主化显得尤为重要与迫切。在此背景下,构建完善的具身智能相关标准体系成为有效的解决方案,将有助于引导和规范国内产业的发展,缩小与国际先进水平的差距。
具身智能全场景多层级标准体系
如上所述,具身智能机器人在与环境的互动中学习,具备很强的通用性,可以被应用于多种场景。如图3所示,具身智能全场景多层级标准体系覆盖核心零部件、机器人整机、机器人应用场景以及多场景的群体智能多个层级,从而在每个层级上确保功能的全面覆盖以及性能的领先性。

在零部件与整机标准中,通过规范零部件产品的定义、性能指标以及试验方法,为相关的企业或检测机构提供标准依据,为零部件和整机的性能与质量评价提供技术依据,为客户在选择产品时提供科学的评价指标,从而促进行业的规范化。在应用场景标准中,侧重于场景对具身智能机器人的特殊要求。例如,应用于工业场景的具身智能机器人,需结合工业机器人的用途和工作环境,针对机械臂、移动平台等各自特点,规范其在安全持续运行、噪声、电磁兼容性、环境条件和可靠性等方面的技术性能要求和试验方法。在群体智能标准中,则需要考虑具身智能机器人多机协同的智能交互和协同能力,规范其多机协同分布式环境下的性能指标和评价方法。
具身智能机器人的发展趋势主要体现在两个方面:第一,具身智能机器人的应用场景越来越多样化,涵盖了工业自动化、家庭服务、农业、特种作业等多个领域,这些场景对机器人的性能、功能和可靠性提出了不同的要求。全场景多层级标准体系可以根据不同应用场景的具体需求制定相应的标准,确保机器人在各种环境中都能稳定运行并完成预定任务。第二,多技术集成是具身智能机器人发展的另一大趋势。随着覆盖场景的不断扩展,具身智能机器人系统变得越来越复杂和智能。全场景多层级标准体系可以通过制定不同层级的标准,从基础技术—系统集成—具体应用—群体智能,全面覆盖各个层面的要求,促进技术创新和优化。
具身智能标准体系建设的重要性。标准体系的建设对于各个行业领域乃至国家来说都至关重要,关系到整个社会的有序发展和效率提升。在制造业中,标准体系可确保产品符合安全要求,防止因产品质量问题导致的事故和伤害。标准化的流程与操作可以减少错误和重复工作,提高生产效率和工作效率。国际标准的建立促使不同国家和地区的产品能够更容易被接受和交易,进而促进了国际贸易的发展。通过标准体系,消费者可以更清楚地了解产品的性能和质量,作出更明智的购买决策。同时,标准体系为新技术和新产品的开发提供了框架和指导,有助于创新的快速实施和推广,加速技术迭代和升级。标准化的组件和流程可以降低生产成本,提高经济效益。
以通信行业的5G技术为例,在5G统一标准体系形成之前,不同厂商和国家在技术路线选择上存在分歧,缺乏统一的技术和标准指导,导致在5G技术的研发和部署上出现多个不同的方向和技术实现,增加了行业协作的复杂性和成本。随着3GPP(3rd Generation Partnership Project,第三代合作伙伴计划)等国际标准化组织的努力,5G标准体系得以建立并逐渐统一,为行业的健康发展奠定了基础。
标准体系的建立是移动通信行业从零到万亿美元市场发展的制胜法宝。以早期国内汽车产业为例,由于国际上相关标准体系以欧美日为主,国内缺乏统一的技术标准和规范,汽车制造商倾向于采用不同的技术和零部件标准。这不仅加剧了技术壁垒,增加了生产成本和维修难度,也限制了技术创新和产业升级的速度。不同汽车制造商为巩固自身的标准而生产互不兼容的零部件,导致了生产效率的降低及资源浪费。此外,缺乏与国际接轨的标准体系成为出口贸易的一大障碍。由于国内标准与国际标准存在差异,早期国内汽车产品在国际市场上面临认证困难、技术壁垒等问题,从而限制了其国际竞争力的提升。
由此观之,建立完善的标准体系对于推动产业发展、提升企业竞争力至关重要。制定与国际接轨的高标准体系,可以促进技术创新、引领产业协同发展,降低企业成本、提高产品质量,从而更好地参与国际竞争,实现高质量发展。
根据高工产业研究院(GGII)预测,在具身智能最重要的赛道——人形机器人方面,预计2024年至2030年全球人形机器人销量将从1.19万台增长至60.57万台,对应市场规模将从2024年的10.17亿美元提升到2030年的150亿美元。我国在该领域的年均增速将高于全球平均水平,2024年至2030年中国人形机器人销量将从0.40万台左右增长至27.12万台。预计2024年中国人形机器人市场规模为21.58亿元,到2030年将达到近380亿元。[10]可以预见,具身智能相关标准体系以及与国际接轨的高标准体系的建立完善,有利于推动具身智能相关产业技术创新、引领产业协同发展,促进国产化替代,建立我国自主可控的产业标准和生态。
具身智能标准体系现状。具身智能系统的安全性至关重要,因为这些系统通常在与人类近距离接触的情况下运行,任何故障或意外行为都可能导致严重伤害。[11]具身智能领域发生的安全问题通常源于系统设计不当,如目标函数设置错误或学习过程中的数据污染等问题。
具身智能的可靠性同样重要,涉及物理组件的耐用性和系统在各种运行条件下的稳定性能。[12]软件的稳定性要求嵌入式人工智能算法和软件在运行时不会出现崩溃或重大错误,而容错机制则可以在系统发生故障时进行自我修复,将其对性能和安全性的影响降至最低。
具身智能的性能标准包括任务的准确性和速度以及资源使用的效率,这些标准确保系统在高效执行功能的同时,不消耗过多的能源或处理能力。[13]可用性标准则确保具身智能系统在与人类用户互动时便于使用、易于访问,并满足不同用户的需求。
目前,具身智能系统的发展仍处于起步阶段,尚缺乏全面的标准框架予以规范。具身智能系统与智能电动汽车在复杂性和安全要求方面有许多相似之处,两种系统都依赖于复杂的传感器、执行器和控制算法,在动态环境中执行复杂任务。因此,智能电动车的标准框架可以为具身智能系统的标准制定提供借鉴。
智能电动车的标准框架由多项标准组成,涵盖了从部件到整个系统的全面指导。例如,ISO 6469和IEC 62133关注电池安全,[14]ISO 26262规范电气和电子系统的功能安全,[15]而ISO 21434针对道路车辆的网络安全进行规范。[16]这些标准确保了智能电动车核心零部件与整机的安全和性能。在此基础上,具身智能系统的标准框架可以借鉴智能电动车的标准,构建自身的零部件和整机标准体系。
与智能电动车不同的是,具身智能系统的可用性更为关键,因此需要发展相应的标准以满足用户交互的需求。ISO 9241系列标准提供了交互式系统的设计指导,但具身智能系统的可用性标准尚需进一步发展。[17]此外,由于具身智能系统可以应用于多种场景,如人形机器人在智能制造和家庭服务中的不同应用,因此需要定义并评估其在各应用场景中的性能。例如,ISO 18497规定了农业自动化机械的安全和性能要求,这种方法可以用来评估农业机器人在实际应用中的能力和局限性。[18]
总体而言,具身智能系统在各个方面尚缺乏全面的标准体系予以规范。尽管在零部件和整机方向可以借鉴智能电动车的标准体系,但其在应用场景标准体系和群体智能标准体系方面仍基本处于空白。笔者建议我国优先发展具身智能应用场景标准体系和群体智能标准体系,从而通过产业优势和应用场景迅速占领具身智能国际标准的高地。
具身智能应用场景标准体系。具身智能零部件与整机的标准可以由具身智能厂商领衔定义,而应用场景的标准则需要由具身智能的应用方来定义,这也是二者在标准制定过程中的核心差异。
当前,具身智能机器人可应用于工业、服务、航天、海洋和电力等多个领域。例如,在汽车制造场景中,工业流水线机器人通过先进的视觉识别技术实现轮胎轮毂的高精度位姿识别,确保装配过程的生产效率。在航天领域,精密装配机器人通过力觉与触觉感知技术,完成复杂操作,提升航天设备的可靠性和精度。在海洋领域,海缆清理维护自主导航作业机器人通过声呐系统和惯性测量单元精确执行任务,有效解决海缆定位、检测和维护的难题。在电力领域的高压输变电线路除冰场景中,除冰机器人通过智能作业系统和高效的除冰技术,确保电力传输的安全稳定。
在目前的发展阶段,每个行业的潜在具身智能机器人使用方都应该积极定义各自使用场景的机器人使用标准。例如,针对目前电力行业挂接地线人工操作风险高、效率低的现状,变电站500kV输电线路检修作业可以使用具身智能人形机器人,从而降低人员操作风险,提升挂接地线自动化作业水平,实现检修作业的数字化与智能化。场景的标准化要求人形机器人符合变电站安全作业章程和高空作业底盘配重要求;通过雷视融合导航系统,实现检修作业线路的精准定位和导航;通过基于电磁感应的非接触验电技术,实现挂接地线机器人安全作业范围的智能感知;通过基于模仿学习的双机械臂协作系统,最终实现挂接地线自动化作业。
具身智能群体智能标准体系。在具身机器人应用场景标准体系的基础上,笔者建议建立群体智能标准体系,通过多机器人多场景协同完成如城市管理、公共安全、交通管理等复杂的多场景组合任务。以城市管理为例,群体智能机器人可以在公共设施维护、垃圾处理等多个场景中发挥重要作用。
公共设施巡检机器人和维护机器人负责定期巡检城市公共设施,如路灯、电线杆、下水道、公共座椅等。巡检机器人配备摄像头和多种传感器,能够检测设施的外观和功能状态,在发现问题后及时将数据上传到管理中心。维护机器人在接到指令后,执行具体的维修任务。这些机器人的作业水平需要满足《城市道路照明设计标准》(CJJ 45-2006)等行业标准。
垃圾处理机器人包括智能垃圾车和垃圾分类机器人。智能垃圾车负责收集和运输城市垃圾,配备GPS和路径规划系统,能够高效地完成垃圾收集任务。垃圾分类机器人则负责在垃圾处理中心对垃圾进行自动分类,利用视觉识别和机械臂技术,将不同类型的垃圾分拣到相应的处理区域。这些机器人的作业水平需要满足《城市生活垃圾收集运输技术规范》(CJJ 205-2013)等行业标准。
道路清洁机器人包括清扫机器人和洒水机器人。清扫机器人配备清洁刷、吸尘装置和垃圾收集箱,负责城市道路、广场、公园等区域的地面清洁。洒水机器人配备水箱和喷洒系统,负责清洗地面和降低空气中的扬尘。这些机器人的作业水平需满足《城市道路清扫保洁质量标准》(CJJ/T126-2022)等具体标准。洒水标准需根据季节和天气情况灵活调整,以确保地面清洁和空气质量。
在执行不同城市管理任务的基础上,可通过标准化管理实现机器人跨场景协同水平的提升。第一,数据标准化可以确保不同类型的机器人在不同场景中共享和理解相同的数据。例如,清洁机器人收集的数据可以通过统一的接口和协议上传到云平台,与公共设施巡检机器人共享,从而在检测到环境异常时自动调度巡检机器人进行进一步检查。第二,任务分配和调度标准化通过标准化的任务分配和调度算法,确保机器人能够根据实时情况动态调整工作任务。比如,在道路清洁场景中,清扫机器人和洒水机器人可以根据标准化的调度系统,合理安排清扫和洒水的顺序与区域,避免重复工作,提高工作效率。
量化协同水平可以通过以下指标进行评估:首先,通过比较单个机器人和多个机器人协同工作完成同一任务所需的时间,量化协同工作的效率提升。例如,将测量清扫机器人和洒水机器人协同完成整个道路清洁任务所需的时间与单个机器人独立工作的时间进行对比并制定优化方案。其次,通过评估机器人在协同工作时的资源利用情况,量化协同工作的资源优化程度。最后,通过协同稳定性评估机器人在不同场景下协同工作的稳定性,包括通信稳定性、数据传输的可靠性和任务执行的一致性。
通过这些多场景组合,群体智能机器人可以全面提升城市管理的效率和质量,为市民提供更加舒适、安全和便利的生活环境。群体智能标准体系的建立,不仅有助于规范机器人的操作,确保其性能稳定、可靠,而且有利于推动智能城市的建设和发展。
具身智能标准体系发展建议与展望
鉴于具身智能同时兼具人工智能与机器人技术的显著特点,其标准体系构建可参考以上两大领域。同时,建议结合具身智能的特性和实际需求,从具体行业应用、地方等层面制定更为适用的体系。2016年5月,为加快推进智能制造标准体系建设,加强部门间统筹协调,国家标准化管理委员会等有关部门组织全国专业标准化技术委员会、相关研究机构、企业、专家成立国家智能制造标准化协调推进组、总体组和专家咨询组。2017年5月,国家标准化管理委员会等四部门组织制定了《国家机器人标准体系建设指南》。2021年底,全国机器人标准化技术委员会(SAC/TC591)成立,对于进一步完善机器人标准体系,加强机器人研发领域的国际合作发挥了重要作用。2024年6月,工业和信息化部等四部门印发的《国家人工智能产业综合标准化体系建设指南(2024版)》出台相关指导意见,[19]指出具身智能作为关键技术的组成部分,需“规范多模态主动与交互、自主行为学习、仿真模拟、知识推理、具身导航、群体具身智能等标准”。
有鉴于此,构建场景驱动的具身智能标准体系应以整体框架与标准制定为基础,细化零部件相关标准体系,注重标准的融合性,并通过建立通用的评测体系、具体的性能测试及安全评估方法等手段全面评价具身智能系统的性能和安全性,通过系统专业认证推动行业内的标准化和规范化以及相关标准的执行和推广,从而为具身智能技术的健康发展提供有力支撑,并推动相关产业的持续创新和进步。

如图4所示,基于对具身智能标准体系发展提出的具体建议与展望,应加快构建集成机器人计量校准、功能性能测试、产品认证的一站式平台,进一步提升我国具身智能机器人产品性能与质量,加快推动我国具身智能机器人产品进入全球市场,从而在技术性与经济性两个方面提升我国具身智能的产业竞争力。
计量服务是标准体系的精确支撑。计量服务包括对传感器、执行器和控制系统的精度校准,以确保所有测量设备和仪器符合国际计量标准。通过提供校准证书,其能够为具身智能机器人的产品质量和测试结果提供可靠依据。
测试服务是验证标准实施效果的手段。测试服务将提供全面的具身智能机器人功能以及性能测试,包括核心零部件和整机的功能验证和可靠性测试,确保产品符合标准。测试服务涵盖环境适应性测试、寿命测试、抗干扰测试、负载测试等,确保具身智能机器人在各种工况下的稳定性和可靠性。
认证服务是标准体系实施的保障。认证服务将协助具身智能企业进行产品认证,提供从申请到审核的全程指导,加快推进具身智能产品的市场准入,推动具身智能企业在全球市场上获得认可。
标准体系与计量、测试和认证一站式服务相辅相成,两者的发展是一个迭代进化的过程。一方面,标准体系提供了明确的技术规范和质量要求,没有标准体系,测试和认证就失去了依据,计量服务也难以保证其准确性和一致性。另一方面,在计量服务过程中,如果收到某些标准规定的测量方法、参数不够精确或计量难以重复的反馈,将有助于标准体系技术参数的修订。测试服务通过实际测试,提供了大量关于产品性能、可靠性和安全性的数据,这些数据有助于提升标准体系的覆盖率。认证服务在执行过程中,可能会遇到标准规定不明确、执行难度大或与实际情况不符等问题。这些问题的发现和反馈,对于标准体系的迭代和改进具有重要作用。
综上所述,通过严格的计量、测试和认证的一站式服务来实施具身智能标准体系,有利于提升产品在国内外市场的技术竞争力。特别是认证服务的全程指导和支持,能够显著缩短具身智能产品的市场准入时间,提高市场响应速度。
(本文系广东省深圳市龙岗区深圳创新“十大行动计划”配套项目的阶段性成果,项目编号:LGKCSDPT2024002)
注释
[1]S. S. Liu; S. Wu, "A Brief History of Embodied Artificial Intelligence, and Its Future Outlook," 29 April 2024, https://cacm.acm.org/blogcacm/a-brief-history-of-embodied-artificial-intelligence-and-its-future-outlook/.
[2]R. A. Brooks, "Intelligence Without Representation," Artificial intelligence, 1991, 47(1-3).
[3]R. Pfeifer; C. Scheier, Understanding Intelligence, 2001, Cambridge: MIT Press.
[4]L. B. Smith, "Cognition as a Dynamic System: Principles from Embodiment," Developmental Review, 2005, 25(3-4).
[5]S. S. Liu, "Shaping the Outlook for the Autonomy Economy," Communications of the ACM, 2024, 67(6).
[6]"China's Edge in the AI Robotics Race Lies in the Greater Bay Area," South China Morning Post, https://www.scmp.com/comment/china-opinion/article/3255998/chinas-edge-AI-robotics-race-lies-greater-bay-area.
[7][9][10]高工咨询、高工移动机器人:《中国人形机器人产业发展蓝皮书(2024)》,2024年。
[8]赵玥炜、毛冠锦:《关节执行器:受益人形机器人发展,国产化有望加速》,《 海通证券研报》,2024年5月17日。
[11]D. Amodei et al., "Concrete Problems in AI Safety," 2016, arXiv preprint arXiv:1606.06565.
[12]Z. S. Wan et al., "The Vulnerability-Adaptive Protection Paradigm," Communications of the ACM, 2024, 67(9)
[13]Y. Y. Huang et al., "Corki: Enabling Real-time Embodied AI Robots via Algorithm-Architecture Co-Design," 2024, arXiv preprint arXiv:2407.04292.
[14]ISO 6469-1: 2019: Electrically Propelled Road Vehicles — Safety Specifications — Part 1: Rechargeable Energy Storage System (RESS); IEC 62133: Safety Testing for Lithium Ion Batteries.
[15]ISO 26262: Functional Safety Standard for Modern Road Vehicles.
[16]ISO/SAE 21434: 2021: Road Vehicles — Cybersecurity Engineering.
[17]ISO 9241-20:2021: Ergonomics of Human-System Interaction.
[18]ISO 18497: 2018: Agricultural Machinery and Tractors — Safety of Highly Automated Agricultural Machines — Principles for Design.
[19]工业和信息化部:《四部门关于印发国家人工智能产业综合标准化体系建设指南(2024版)的通知》,2024年7月2日,https://wap.miit.gov.cn/zwgk/zcwj/wjfb/tz/art/2024/art_e8ebf5600ec24d3db644150873712c5f.html。
责 编∕张 贝 美 编∕周群英
Overview of Embodied Artificial Intelligence Standards Systems
Liu Shaoshan Ding Ning
Abstract: The widespread adoption and continuous advancement of embodied artificial intelligence are poised to drive technological innovation and boost productivity across various industries, delivering significant economic benefits to society. However, the performance and quality of embodied artificial intelligence components and systems in diverse application scenarios remain critical bottlenecks hindering their development. To address this, a scenario-driven standardization system is essential. It is necessary to build a comprehensive framework that integrates robot metrology and calibration, performance and functionality testing, and product certification. Such a one-stop platform would significantly enhance the performance and quality of embodied artificial intelligence robots in China, accelerating their entry into the global market. By doing so, it would strengthen China's industrial competitiveness in embodied artificial intelligence, both technically and economically, fostering leadership in this rapidly evolving field.
Keywords: embodied artificial intelligence, standardization, quality assurance, supply chain, scenario-driven methodology